




















Introduction
In our final project, we created a smart voice decoder system that is capable of recognizing vowels in human speech. The audio input is sampled through a microphone/amplifier circuit and analyzed in real time using the Mega644 MCU. The user can record and analyze his/her speech using both hardware buttons and custom commands through PuTTY. In addition, the final product also supports a simple voice password system where the user can set a sequence of vowels as password to protect a message via PuTTY. The message can be decoded by repeating the same sequence via the microphone.
Some of the topics explored in this project are: Fast Walsh Transform, sampling theorems and human speech analysis.
Here is a video summary of our project
High Level Design
Design Rationale
The idea of our project stemmed from seeing one of the previous ECE 4760 final projects, Musical Water Fountain. In their project , they used Fast Walsh Transform to analyze audio signal generated by a MP3 player (shown in table below).
LED 0 1 2 3 4 5 6 7
Freq 0-170 170-310 310-420 420-560 560-680 680-820 820-930 930-10000
Then they would turn on the LED that corresponded to the most energetic frequency division in the input frequency spectrum. This made us wonder if identifying speech is possibly by a method similar to this.
In fact, with today's technology, speech recognition is fully realizable and can even be fully synthesized. However, most of the software that deals with speech recognition require extensive computation and are very expensive. With the limited computation power of mega644 and a $75 project budget, we wanted to make a simple, smart voice recognition system that is capable of recognizing simple vowels.
After careful research and several discussions with Bruce, we found that vowels can be characterized by 3 distinct peaks in their frequency spectrum. This means if we perform a transform to input speech signal, the frequency spectrum profile will contain characteristic peaks that correspond to the most energetic frequency component. Then if we check to see if the 3 peaks in the input fall in the ranges we defined for a specific vowel, we will be able to deduce is that vowel component was present or not in the user's speech.
Logical Structure
The main structure of our decoder system centers on the mega644 MCU. Our program allows the MCU to coordinate commands being placed by the user via PuTTY and the button panel while analyzing the user's audio input in real time. On the lowest design level (hardware), we have microphone and a button panel to convert physical inputs by the user into analog and digital signals the MCU can react to. On the highest level, PuTTY displays the operation status of the MCU and informs the MCU of user commands being placed at the command line. PuTTY also offers user the freedom to test the accuracy of our recognition and simulates a security system where the user must say a specific sequence of vowels to see a secret message.

Mathematical Theory
Vocal Formats
Basically, the first three formant frequencies (refer to peaks in harmonic spectrum of a complex sound) can attribute to the different appeal of vowel sounds.

Therefore, if we can pick out formant by intensities in different frequency ranges, we can identify a vowel sound and use sequence of vowel to generate an audio pass code specific to that vowel.

Frequency Transform Algorithms
The biggest difference between our analysis and musical intensity is that we need to adjust the frequency range stated above to better tell apart the difference between several peaks and combine all other information including amplitude. We need to decide which frequency transform algorithm is better to be used for a real-time audio addressing in both accuracy and computation speed. In fixed point DSP function in GCC, DCT, FFT & FWT are several common used algorithms. In our case, we chose Fast Walsh Transform over the rest simply because of its speed and its linear proportionality to Fast Fourier Transform.
The Fast Walsh Transform converts the input waveform into orthogonal square waves of different frequencies. Since we are only working with voice ranges here, we set the sample frequency to 7.8K which allows us to detect (ideally) up to 3.8kHz. We also knew that the lowest fundamental frequency of human voice is about 80-125Hz. Thus, we chose a sample size of 64 bit. This generates 32 frequency elements equally spaced from 0Hz to 3.8kHz (not including the DC component). The individual frequency division width is 3.8k/32=118.75Hz which gives maximizes our frequency division usage (since we could have useful information in every division instead of say a division width of 50Hz, where the first division does not provide useful information). Furthermore, this choice also minimizes our computation time since the more samples we have to compute, the more time it will take for the MCU to process input audio data.
MATLAB Simulation Results
In this part, most research we did were based on common vowel characters like 'A','E','I','O','U', which demonstrated that the method we attempt to develop could achieve. Yet in the real case, we found that the difference of these five characters is not as obvious as simply comparison between frequency sequency could distinguish.

We first use Adobe Audition to observe initial input waveform taken directly from Microphone and AT&T text2speech as shown in the picture. Although the waveform corresponding to the same vowel would result in a similar shape, there still exists difference which we may find more straightforward in frequency domain.
The first program in MATLAB is based on Prof. Land's code that compares the FFT and FWT outputs as spectrograms, then takes the maximum of each time sliced transform and compares these spectrograms. Top row is FFT power spectrum, FWT sequency spectrum is in the bottom. The maximum intensity coefficient of each spectrogram time slice in FFT and FWT are almost in the same shape. We'll take one spectrum as an example.

Another program directly implements FFT and show a frequency series. In this figure we can clearly see the resonance peaks of a vowel. This transform is 256 points. Also, notice that because of noise interference, it would be hard to tell apart the second peak for [EE] and this is not the only case.

Hardware/Software Tradeoffs
Due to the limited precision of our Fast Fourier Transform, frequencies that differ by a value that is less than the width of our frequency division are often not distinguished. When dealing with boundary frequencies, this was a problem for us since the peak frequency did not always reside in the same frequency division. To improve upon this, we used multiple divisions but we still had errors since we cannot consider every possible boundary case. We improved upon this further by boosting the gain of our op amp from x10 to x100. This boast gave us a much better summary result and reduced our error. However occasionally, we still have errors that stem from the precision of our analysis tool.
Relations to IEEE Standards
The only standard applicable to our design is the RS232 serial communication protocol. We used a MAX233 level shifter and a custom RS232 PCB designed by Bruce Land.
Relevant Copyrights Trademarks and Patents
The mathematical theories for frequency analysis of audio signals were obtained from both discussions with Bruce Land as well as R. Nave's webpage from Georgia State University.
Hardware Design
Overview
Our hardware setup consists of a prototype board that hosts the MCU and three other individual function panels. Audio input is processed through the amplifier panel and sampled by the MCU. The RS232 board allows the state of the MCU and user input to be sent to the PuTTY. The last function panel allows user to change the current operating mode of the MCU and enables the audio input to be sampled or discarded in the main program.
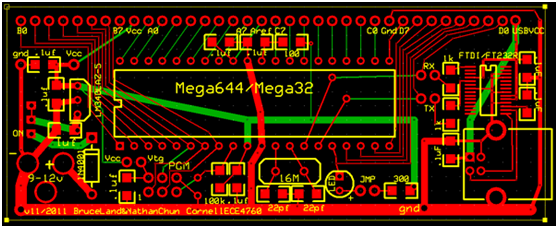
ECE 4760 Custom PCB
The prototype board we used is the mega644 prototype board design by Bruce Land. The printed PCB layout is shown below. The only port pins used (soldered) are C0,C1,C7 and A0. We also had to solder RX and TX pins to enable RS232 serial communication.


Audio Amplifier Circuit Panel
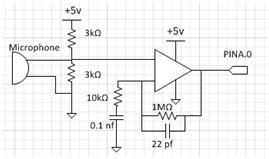
 The amplifier circuit used is shown below. The microphone used in this project uses a charged capacitor to detect vibrations in air. As a result, R2 provides the DC bias necessary to maintain the charge across the internal capacitor of the microphone to allow sounds to be converted to electrical energy. R1 provides the DC bias that the microphone needs to remain functional. The LM358 op amp operates as a 2 stage signal filter. The negative voltage input of the op amp is first passed through a low pass filter with a time constant of approximately 42microSec. This is the upper bound of our audio signal filter since normal human speech lies between 85Hz to 3kHz. The value of the parallel resistor/capacitor feedback circuit is determined by the gain we wanted to achieve. In our case, we chose the amplifier gain to be 100, thus the value of R4 we chose is 1M Ohms (100 times R3) and C2 is chosen to compliment the operating frequency of less than 3kHz. The output of the op amp is fed to the analog compare input of the MCU (PINA.0) and analyzed at a rate of 7.8kHz.
The amplifier circuit used is shown below. The microphone used in this project uses a charged capacitor to detect vibrations in air. As a result, R2 provides the DC bias necessary to maintain the charge across the internal capacitor of the microphone to allow sounds to be converted to electrical energy. R1 provides the DC bias that the microphone needs to remain functional. The LM358 op amp operates as a 2 stage signal filter. The negative voltage input of the op amp is first passed through a low pass filter with a time constant of approximately 42microSec. This is the upper bound of our audio signal filter since normal human speech lies between 85Hz to 3kHz. The value of the parallel resistor/capacitor feedback circuit is determined by the gain we wanted to achieve. In our case, we chose the amplifier gain to be 100, thus the value of R4 we chose is 1M Ohms (100 times R3) and C2 is chosen to compliment the operating frequency of less than 3kHz. The output of the op amp is fed to the analog compare input of the MCU (PINA.0) and analyzed at a rate of 7.8kHz. 
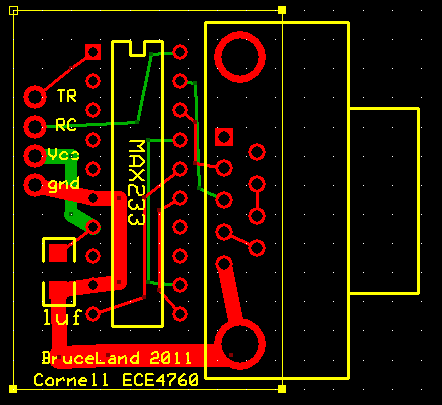
RS232 Serial Communciation Panel
To better user experience with our design, we decided to use serial communication via PuTTY to inform the user of the current operating state of the program. We also felt that it would be a lot more convenient if the user could control the program via both hardware as well as software. To enable serial communication between the MCU and a PC, we used the Max233CPP level shifter chip and the RS232 connector PCB Bruce had designed. The transmit and receive pins on the MCU prototype board are connected to the TR and RC pins on the RS232 board to enable communication.


Hardware User Interface (Control Buttons)
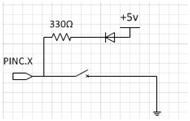
 Our hardware user interface consists of 3 buttons and 3 indication lights. When a button is held down, the corresponding LED will turn on. In our setup, pressing the green LED/button combination displays the results summary on the PuTTY screen. Pressing the yellow LED/button combination begins the sampling the MCU. Analysis on the input data is performed when this button is released (see code below for details). Each button is signaled by a pin in PORTC. The red LED/button combination allows the user to change the operating mode of the program between testing mode and decoding mode. The switch/LED circuitry for 1 button is shown to the right. When the button is pulled low (i.e. pressed) the LED is connected to ground via a 1k resistor and lights up.
Our hardware user interface consists of 3 buttons and 3 indication lights. When a button is held down, the corresponding LED will turn on. In our setup, pressing the green LED/button combination displays the results summary on the PuTTY screen. Pressing the yellow LED/button combination begins the sampling the MCU. Analysis on the input data is performed when this button is released (see code below for details). Each button is signaled by a pin in PORTC. The red LED/button combination allows the user to change the operating mode of the program between testing mode and decoding mode. The switch/LED circuitry for 1 button is shown to the right. When the button is pulled low (i.e. pressed) the LED is connected to ground via a 1k resistor and lights up.
Software Design
Overview
Overall, the program is broken down as follows:
Serial communication-take user input & display result
Button state machine-for test/demo mode user interface
FWT transform analysis-provide frequency ranges of input waveform
Vowel recognition-analyze vowel spectra and identify
Decode-check whether input vowel sequence is what we expected
Initialize
There are 7 header files and 1 source file included. "uart.h" & "uart.c" are used for UART driver. specify basic function for GCC compiler. provides context for handling interrupts. provides interfaces for a program to access data stored in program space of the device.
Variables initialized can be divided into four modules. One for FWT algorithm contains fixed number, size of FWT, frequency range specification. One for button state machine defines timer and button state. The third and fourth modules consist of characteristic specification, vowel counters, passcode setting, and passcode comparison. Besides, in the void initialize() function, UART is initialized and timer0 is set up to sample A/D. We also need to enable ADC, set pre-scalar, clear interrupt enable and prepare to start a conversion.
The sampling frequency we chose at the analog input is 7.8kHz. Since the highest voice fre quency is about 3.5kHz, 7.8kHz sampling rate gives us a reasonable upper bound.
Interrup Service Routines (ISR)
ISR(TIMER0_OVF_vect)
There is only 1 interrupt service routine used in this project: timer0 overflow ISR. Timer0 is used to read A/D converter and update appropriate buffer. We also use timer0 to maintain 1ms tick for all other timing in this program, including two button state machine and a monitor. Each button monitor program gets executed every 30 machine cycle, this was purposely chosen to make user interactions run noticeably smooth.
Task Breakdown
FWT transform to sequency order
This part is based on Prof. Land's code, which attempts to light up LEDs corresponding to which sequency bands have the most energy. The program takes a 64 points FWT as a sample rate of 7.8 kHz, throws the DC component, adds the absolute value of the sal and cal components. This gives us 33 frequency divisions equally spaced from 0Hz to 3.8kHz. The value stored in each frequency division is proportional to its energy level in the sampled data. This is used later to identify the characteristic peaks (most energetic frequency component) of vowels.

voidFWTfix(int x[])
This function does forward transform only, and useFWTreorder() to put the transform in sequency order.
voidFWTreorder(int x[], const prog_unit8_t r[])
This function converts from dyadic order to sequency order.
void transform(void)
This function can be divided into two parts. The first part computes FWT transform, updates the FWT, generates a sequency order, combines sal&cal, an omits DC in ain[0]. We will talk about the second part later.
Serial Communciation
voidserialComm(void)
This part takes user input and defines all the system behaviors in user interface including: s=set passcode; r=reset current entry; p=print passcode stored; t=enter testing mode. As the whole system has two modes (test/demo), and three processes (passcode setting->vowel recognition->decoding). It first checks if system is current in the state of waiting for entry. Then for "s" command, it calls intstringtoint(char)to store corresponding number into an array passcode[ ], in which ah: 1; oo: 2; oh: 3; ae: 4; ee:5. When "r" is entered as command, system cleared current entry (result[]) and let the user decode again. Command "p" would print out current passcode for testing. We also add a testing mode for verifying the vowel recognition preciseness.
Button State Machine
This part is responsible for describing all the states selected button may go through involving MaybePush, NoPush, Pushedand executes 30 machine cycles. Every time when called by main, it resets task timer, detect push state and change push flag.

Notice that we had set three buttons marked by green, yellow, & red LEDs, and for each of them, we have a button state machine.
voidbuttonMon(void)
This state machine corresponds to PINC=0xfe and time1. When yellow button is pushed, the system is informed that a new audio extraction process is started. The function clears all previous entries and set PushFlag to 1.
voidplayBackMon(void)
This state machine corresponds to PINC=0x7f and time2. When green button is pushed, the system is informed that all the audio extraction process is completed. The function analyzes all previous entries and set playBackFlag to 1.
voidstateMon(void)
This state machine monitors current device operation state. When red button is pushed, the system is informed that user needs to switch to a demo mode and begin a passcode debugging.
Vowel Recognition
void transform(void)
This second part of this function uses 3 predefined characteristic vowel peaks ranges for each vowel and calculates three characteristics of input waveform. The following algorithm is based on experimental research. We first choose "ah", "oo", "oh", "ae", "ee" as passcode elements. This method is similar to but not the same as purely identifying vowels based on its ideal frequency peaks. This is because some of the vowels such as "ee" and "oh" have very similar transform results. If only the ideal frequency peaks are compared and analyzed, we cannot effectively identify what the user has said. Instead, we experimentally determined the frequency divisions that occur most uniquely to the particular vowel (shows up many times in the transformed signal but is rarely present in other vowel signals).Then for each element, we compare the analyzed FWT results with the peak ranges we have defined and we increment a corresponding vowel counter when that particular vowel has been detected. For example , the characteristic peaks we chose for "ae" locates in the 3rd, 5-12th,12-28th range of the sequence order, while for "oh", the range is changed to 4-7th, 8-11th, 21-31st.
In addition to determining the frequency ranges to use experimentally, we also had a threshold value that is used to compare with the amplitude of the first peak in FWT analysis. For any transform performed with maximum peak amplitude below this threshold, we discard the transformed result. This is because if the amplitude of the first peak is not high enough, we will not be able to detect the second or third peak since
amplitude of first peak > amplitude of second peak>amplitude of third peak.
if(max==3 && second>5 && second<12 && third<28 && third>12) aehCounter++;
if(max>4 && max<7 && second>8 && second<11 && third>21 && third<31) ohCounter++;
if((max==1) && second==5 && third>10 && third<14){
if(compare[max]>30) ooCounter++;
elseeeCounter++;
}
if((max==1 && (second>6 && second <10) && (third>=11 || third<=14))||(max==8 && second==24 && third>27 && third<31)) ahCounter++;
}
This function also lights up a LED as transforming signal.
intfindMax(int x[],int i)
This routine returns a maximum value in a following sequence.
intfindMin(int x[],int i)
This routine returns a minimum value in a following sequence.
int recognize(void)
We initialized 5 counters for vowels and calculate the possibility of each in recognition. The one with the maximum counter number is considered as the correct answer and returned by this function.
Decoding
A comparison between passcode[] & result[] is implemented to proceed decoding.
void display(int t)
This is an additional function called by Main in test mode, when vowel recognition is completed and we need a result display on screen.
Delegating Task Using Main Function
First, initialize() is called to establish register, port configurations on the MCU as well as to start timers and ISRs. Immediately after, it calls serial communication to begin our first command. Then we enter an endless loop which controlled the tasks to be executed based on the timer values and are responsible for resetting the timer values before each of the tasks are called. Note that for each loop, we have to detect whether a button is pushed and which mode the system is working under. In demo mode, a message is displayed on screen indicating that audio input can be started. Each time an audio is extracted, the system returns the recognition result of the vowel. After 5 times of extraction which is exactly the length of a passcode, the system checks whether the sequence is correct, displays the result and prints out "Congratulations" or "Decoding failed". While in test mode, the system just proceed with a simple extraction and recognition process.
Things we tried but did not work :(
Narrow the Search for Peaks Using MATLAB
We tried using MATLAB's fft function to identify the first 3 characteristic peaks of the vowels. We were hoping that by simulating the same voice waveform in MATLAB, we can be sure of the peaks we are looking for in our MCU program. However, the results were not satisfactory and the peaks produced cannot be easily distinguished. Furthermore, depending on the person speaking, the analysis results that came from MATLAB differed greatly. We later switched our algorithm by finding the most frequent element in the vowel's FWT output. Even though these 2 methods are very similar, in the case of boundary frequencies, the second method produced a much more reliable result.
Results
Execution
Despite the fact that we are processing and analyzing data in real time, the FWT analysis and summary were produced instantaneously after the release of the yellow button. There are no known errors associated with controlling the MCU operation via both PuTTY and the physical button panel. Even when 2 buttons are pressed at the same time, the system will sequentially execute the valid commands.
Here are some screen shots of our system during operation:
When the system is turned on, our MCU automatically enters the default testing mode. At the same time, PuTTY will display a welcome screen informing the user that the system is ready to take inputs.

In the testing mode, the user is able to see the summary results of only saying 1 vowel. Audio input is processed when the user holds down the yellow button while speaking into the microphone. When the yellow button is released, the program will automatically compute the FWT and display the prediction in PuTTY.

To leave testing mode, the user can just press and release the red button once. As shown below, PuTTY shows that the program has exited testing mode and entered the decoding mode.
In the decoding mode, the user can set a sequence of 5 vowels as the system password and repeat the same sequence via the microphone while holding down the yellow record button.

If the user accidently entered the reset command before setting a password, the system will inform the user that there is no valid password being stored at the time. The user should set the password first by entering 's' to the command line.

New password is entered by inputting the vowel sequence with commas separating each vowel input. Once entered, the system will display the entered result and automatically enter recording mode where the MCU simply waits for user's audio input.

If the input audio sequence agrees with the stored password, then the congratulations screen will appear along with the secret message.

Anytime there is a command prompt at PuTTY, the user can choose to reset his/her current audio input by entering 'r'. This erases all of the audio inputs stored so far in the system and allows the user to re-record the password again.

Anytime there is a command prompt at PuTTY, the user can see the stored system password by entering 'p' for print. The system will display the entered vowel sequence.

The user can reenter testing mode from decoding mode by entering 't' at the PuTTY command line.

Here are 2 videos demonstrating our system at work
Performance
We originally designed our program to decode female voices. However, when we tested our system, we discovered that it decodes male voices (of much lower fundamental frequency) just as accurate as it decodes female voices. However, due to the limited precision of the FWT we implemented, in cases where the frequency peaks are near our predefined characteristic peak value for a vowel, errors occasionally occur.
We tested our program with a couple of our friends and for a male voice, the program is able to accurately predict the vowel said 49/50 times and for female voices, the program is able to accurately predict 45/50 times. Furthermore, the program only accurately recognizes vowel is the user is consistent in speaking (no accents or instability during recording).
We also found that the MCU tend to confuse between "OO" and "EE" or "OH" and "AE". In the case of "OO" and "EE", the waveforms are very similar. In the FWT output, both vowels have peaks that often overlap. In our program, "OO" and "EE" are determined by the maximum amplitude obtained in the transform. In normal speech, "OO" is louder and "EE" (see below for waveform comparison). This explains why MCU mistakes one for the other.

In the case of "OH" and "AE", FWT of the input waveforms produce almost the same first and second peaks. The two vowels are distinguished mainly based on the location of the third peak. However, the amplitude of the third peak is relatively low and can be easily mixed up with noise. Thus, predictions made about "AE" and "OH" and differ greatly depending how the speech was formulated.

Here are some test results we got using our system:
MCU Confusion for\Expectation ah oh oo ae ee
Female -- -- -- oh oo
Male oh ae -- -- --
MCU's Prediction Accuracy 95% 90% 95% 94% 90%
Safety and Usability
The system that we have designed can be used as a basis for implementing speech recognition since speech consists of vowels and consonants that can be identified using frequency analysis. An example of possible implementation in the real world would be using speech recognition in security systems, something that could be more convenient than entering passwords on a keypad to people with less proficient vision.
Furthermore, our system is simple and easily to handle. The only precaution in using our prototype system is the user must be careful in touching the PCB and port pins to minimize ESD hits.
Conclusion
Expectation
Overall, our final project result achieved all of the goals we defined in our project proposal. Our speech recognition system is able to accurately identify the vowel user has said. We extended this implementation and simulated a security system where the user must say the vowels in a particular sequence to be able to decode a secret message.
Future Improvements
There are two improvements that can be made in the future. The first one is based on current preciseness. Although our system in recognizing five vowels is clear and fits most users, we still need more experimental simulation to help identify characteristics and narrow the search for peaks in vowels. Furthermore, we may develop more characteristics for other vowels and even those not-vowel sounds. This also requires more research on vowel classification.
Another progress would be more complicated word recognition if we've done all the vowel identification. Since we are already able to tell apart five basic vowels, and for most words, an interesting thing is that you can pronounce and classify them with a sequence of basic vowels. For instance, the waveform of "yes" is similar to [ae] and [ee], while when one pronounce "no" , you can simply tell it apart by [oh]. Besides, for a word like "starbucks", the [ah] sound is obvious inside. Yet the difficulty for a word recognition even just based on sequence of vowels is that our current method is based on a cumulatingpossibility which is not strictly corresponding to time. In this way, the algorithm we implement in decoding is no longer useful. We may need to consider another cumulating possibility for all the words that may sound alike and mark the most possible one as result. This may lead to big challenge in accuracy.
Ethical Considerations
We have done our best effort to conform to the IEEE code of Ethics in the design and execution of our project. The FWT algorithm we used in our design was written by Bruce Land. The button state machines we used were modified code from previous lab exercises. There are no known systems using a similar MCU in implementing vowel recognition system. In fact, much of the speech recognition systems available in the world today require a lot more computation power than the mega644 and is able to analyze much more complex voice inputs.
We are honest in reporting the result of our system and our summary results are as accurate as the precision and real time computation capability the MCU can allow.
This system can be used to implement a security system with speech recognition. This can be potentially more convenient for people with less proficient vision than a keypad security system. Furthermore, with more computation power, our system can recognize individual voices and much more complex voice inputs.
Legal Considerations
Our project is a simple audio input and addressing device. It would not cause any interference with other devices and won't result in any violation of regulation.
Appendix
Appendix A: Commented Code
Download the commented code here.
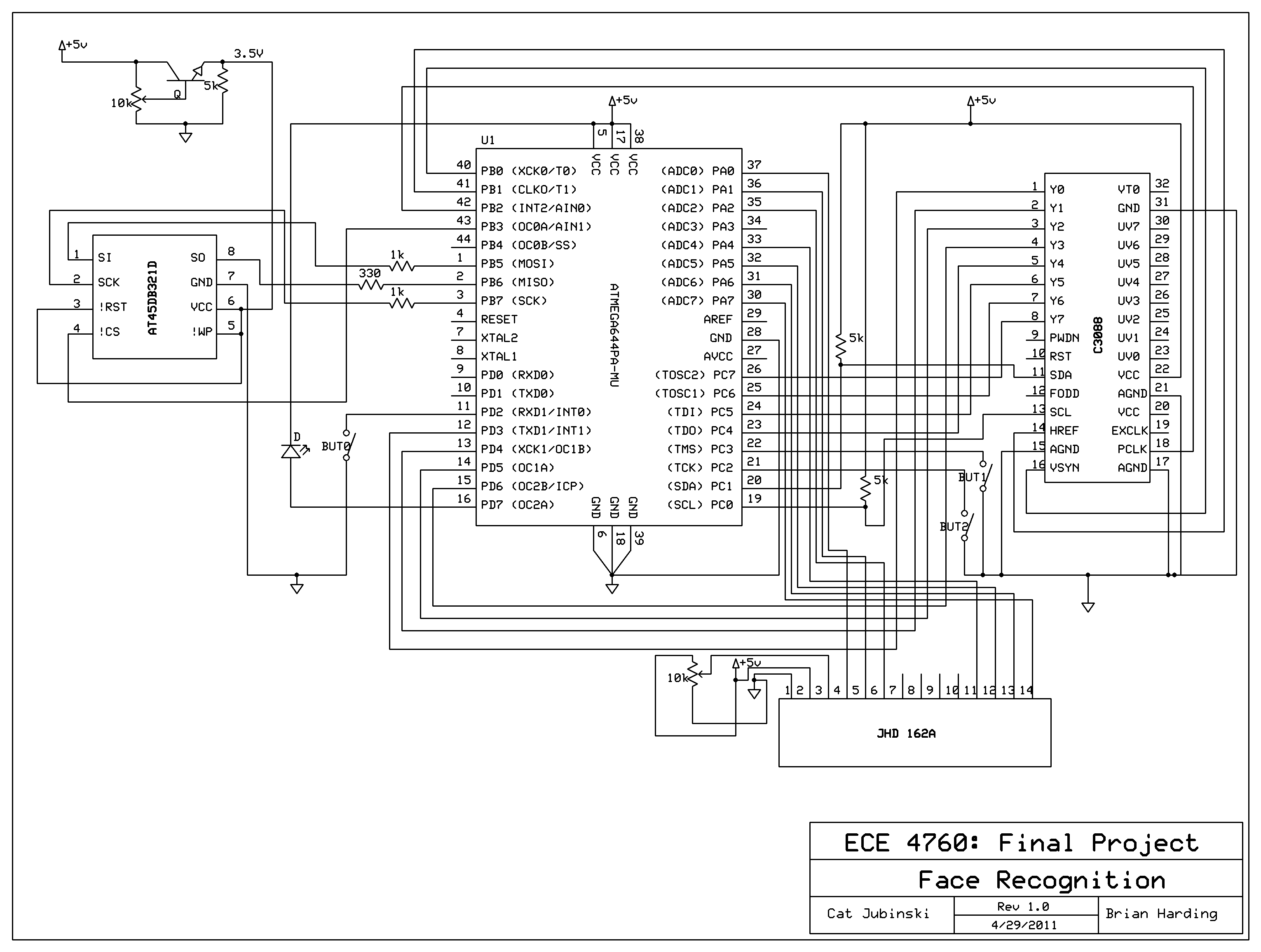
Appendix B: Schematics
Download Prototype Board Schematic for Mega644 here.
Download Audio Amplifer Schematic here.
Download Serial Communication Panel Schematic here.
Download Switch Circuit here.
Appendix C: Parts & Costs
Parts Name Quantity Source Cost/each Cost
Mega644 1 ECE 4760 Lab $8 $8
Solder Board 2 ECE 4760 Lab $1 $2
RS232 Connector 1 ECE 4760 Lab $1 $1
MAX233 1 ECE 4760 Lab $7 $7
Microphone 1 ECE 4760 Lab Free Free
LM358 Amplifier 1 ECE 4760 Lab Free Free
Push Button 3 ECE 4760 Lab Free Free
LED 3 ECE 4760 Lab Free Free
Jumper Cables 10 ECE 4760 Lab $1 $10
Header Pins 14 ECE 4760 Lab $0.05 $0.7
Resistors Several ECE 4760 Lab Free Free
Capacitors Several ECE 4760 Lab Free Free
Power Supply 1 ECE 4760 Lab $5 $5
Custom PCB 1 ECE 4760 Lab $4 $4
Dip Sockets 2 ECE 4760 Lab $0.5 $1
Total Cost
$38.2
Appendix D: Work Division
Average workload: 20 hour per week
Theoretical analysis: Annie Dai, Youchun Zhang
Hardware setup: Annie Dai
MATLAB simulation: Youchun Zhang
Code debugging: Annie Dai, Youchun Zhang
Report: Annie Dai, Youchun Zhang
Appendix E: References
Download Mega644 datasheet here
Professor Land's FWT test code regarding how to find the maximum component of each sequence and displays the corresponding LED on STK500
Previous ECE Project: Musical Water Fountain
R. Nave's page on vowel formants here
Appendix F: The Authors

(top)Youchun Zhang, (bottom) Annie (Wei) Dai












































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}